Satclub-Thueringen (http://www.satclub-thueringen.de/index.php)
- Freaks stellen ihre Anlagen vor (http://www.satclub-thueringen.de/board.php?boardid=34)
-- Liddll (http://www.satclub-thueringen.de/board.php?boardid=121)
--- Projekt: DiSEqC-Bussystem (http://www.satclub-thueringen.de/thread.php?threadid=22696)
Geschrieben von Liddll am 19.08.2015 um 21:41:
 Projekt: DiSEqC-Bussystem
Projekt: DiSEqC-Bussystem
Servus Freunde des drehbaren Blechs

,
möchte mal eine neue Bastelei vorstellen inspiriert vom letzten Sattreffen zum Thema Polarizer von Keuz und DigiSat.
Ziel ist Schrittmotoren, BLDC, Sensoren, etc. direkt über DiSEqC-Befehle zu steuern.
Aufgebaut ist das ganze Modular als Bussystem, d.h. jeder Motortreiber oder jede Sensorschnittstelle erhält eine eigene Platine. Es lässt sich so flexibel erweitern.
Die Übertragung der Daten erfolgt von der CPU-Einheit via CAN-Bus oder I²C. CAN eher gedacht für externe Sensoren o. Geräte mit langen Leitungen. I²C erfolgt auf dem Bus ebenfalls über Differential (PCA9616) um Störungen zu vermeiden. Jede Einheit hat eine eigene wählbare Adresse. Abmessungen je Komponente 5x10cm für Sensoranschlüsse 5x5cm. Diese Größen lassen sich (auch 4-lagig) recht günstig in China fertigen.
CPU Einheit:
- Die Stromversorgung erfolgt im Ruhezustand über den Tuner, sobald es am Bus Arbeit gibt wird ein externes Netzteil zugeschalten um z.B. die Motortreiber zu speisen. Anschließend geht das System wieder in den Standby.
- 2x F-Buchsen zum Durchschleifen
- LAN für WebInterface und Updates
- 32-Bit CPU (PIC32)
- zusätzlich ext. Serieller 1Mbit SQI-RAM und 64Mbit SQI-Flash
- 128x128 RGB-OLED Display für Statusanzeige
- 24-Bit RGB LED Meter
- USB für Updates
- WiFi
- Drehencoder für Bedienung
Motor-Treiber:
- für kleine Schrittmotoren (bis 0,5A á Phase) Treiber (Trinamic TMC260) mit internem Mosfet Stromversorgung über Bus 12V max. 1,5A
- für große Schrittmotoren (max. 8A á Phase) Treiber (TMC262) mit externen Mosfet Stromversorgung über Hochstromschraubkontakte an Busplatine (gleichzeitig Befestigung)
- evtl. noch Treiber für 3-Phasen Gleichstrommotoren
Sensoren:
- Endschalter
- Winkelsensoren
- Kompasssensoren
Sonstiges:
- z.B. Relaisplatine
die Platine der CPU Einheit ist soweit fertig und sollte in 14 Tagen von den Chinesen hier eintreffen, dann gehts ans Bestücken und programmieren im Anhang eine Vorschau
wer noch Ideen zum Projekt hat nur her damit
Geschrieben von Liddll am 14.09.2015 um 22:23:
CPU-Platinen sind eingetroffen - jetzt gehts ans Bestücken, Programmieren, Testen (und Ändern)

jede Menge Hühnerfutter

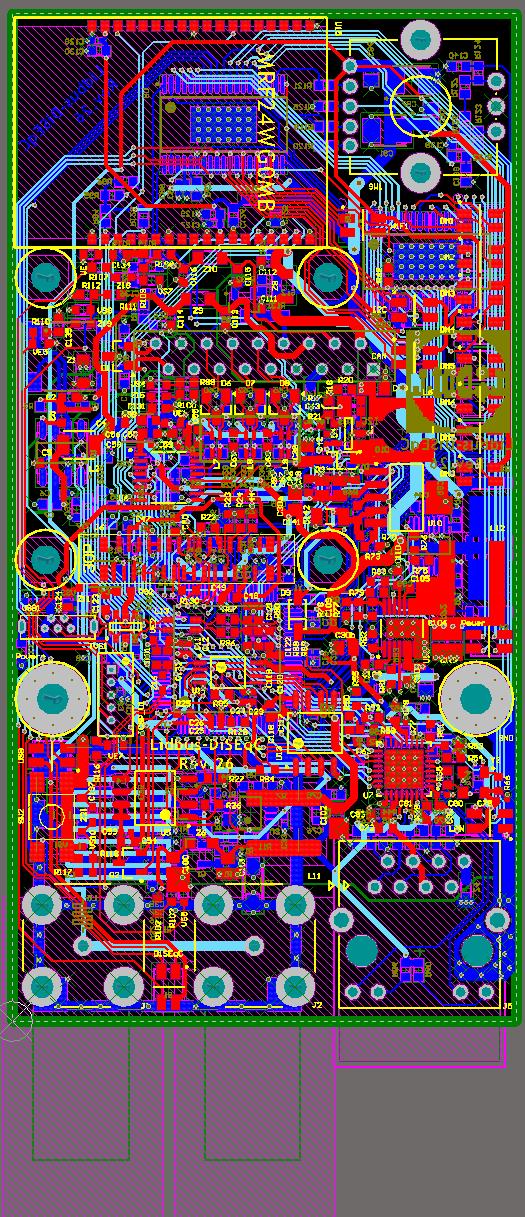
bissl Technisches:
CPU wird ein Pin-gleicher PIC32MZ2048EFH100, da das Errata vom geplanten PIC32MZ2048ECH100 nur so von Fehlern strotzt (sollte man sich vorher halt genauer anschauen

)
schaumermal ob der DiSEqC und Power Teil wie geplant funktioniert - die externen 3V3 werden erst beim Aktivieren der Master-Stromversorgung über den LTC4353 zu- bzw. umgeschalten (Hot-Plug), solange muß die Stromversorgung vom Tuner kommen.
Im minmalen Betrieb läuft nur CPU, LAN (PHY SMSC LAN8740) + bissl Peripherie und braucht ca. 250mA@3V3 unter Vollast, das lässt sich durch Stromsparoptionen sicherlich noch verringern.
Ineffiziente Linearregler wollte ich vermeiden, daher der LT8610 - schafft über 90% (zumindest in der Theorie) bei 18V mit der neuen XHMI von Würth, die ist ebenfalls noch als Filter drin (man gönnt sich ja sonst nix) - vielleicht findet sich ein EMV-Labor als Sponsor
beim DiSEqC Ein- und Ausgang hab ich mich an einigen Referenzdesigns orientiert, obs was taugt wird sich zeigen
Geschrieben von digisat am 15.09.2015 um 20:43:
Hallo Liddll,
das ist ja sehr Interessant.
Kannst du uns ein fertiges Endprodukt zum testen zu Verfügung stellen?
Geschrieben von Liddll am 16.09.2015 um 21:58:
klar, Tester sind erwünscht
welche Ströme (á Phase) habt ihr am Motor ?
Plane gerade nebenher die Treiber Platinen.
Anschlüsse:
Bus
Stromversorgung
Phase A/B
optional Encoder A,B,I (\A\B\I differenzial)
optional Endschalter links
optional Endschalter rechts
optional Nullpunkt
die Endschalter sind optional, der Anschlag wird über Back EMF ermittelt
Geschrieben von Liddll am 21.09.2015 um 22:44:
ein paar erste Tests des Comparator LTC1540:
macht auf Anhieb was er soll, ordentliche 1en (0,5ms) und 0en (1ms) - hier ein Auszug einer DiSEqC-Sequenz:
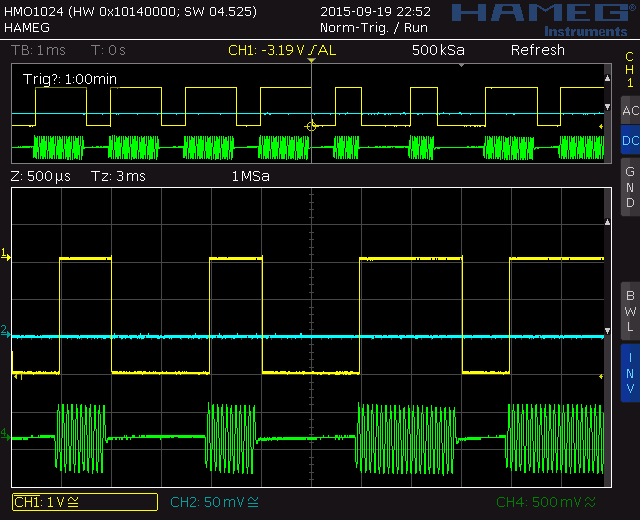
CH1: 3V3 Output
CH4: Signal direkt am Eingang (AC)
Last: 1kOhm
Testtuner: USB TBS5922
Geschrieben von Liddll am 22.09.2015 um 23:01:
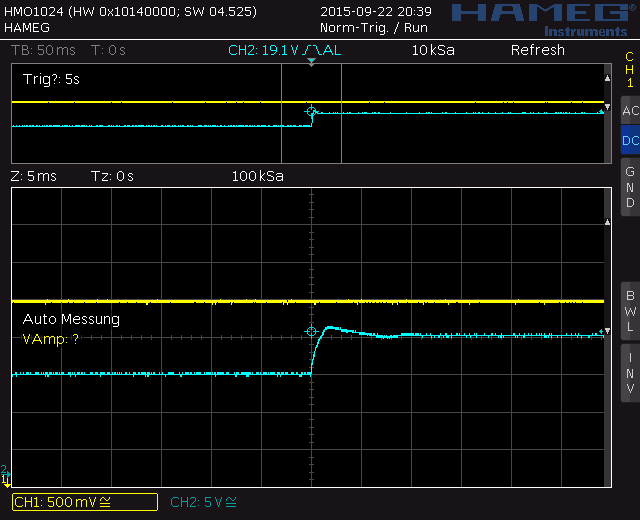
noch paar Messungen am Schaltregler (LT8610), beim Spannungswechsel bleibt 3V3 stabil - man sieht aber den miesen Spannungsregler vom TBS5922, der beim Wechsel von 14V auf 18V erstmal ne "Ewigkeit" auf über 20V rumeiert.
CH1: 3V3
CH2: Spannungswechsel 18V=>14V
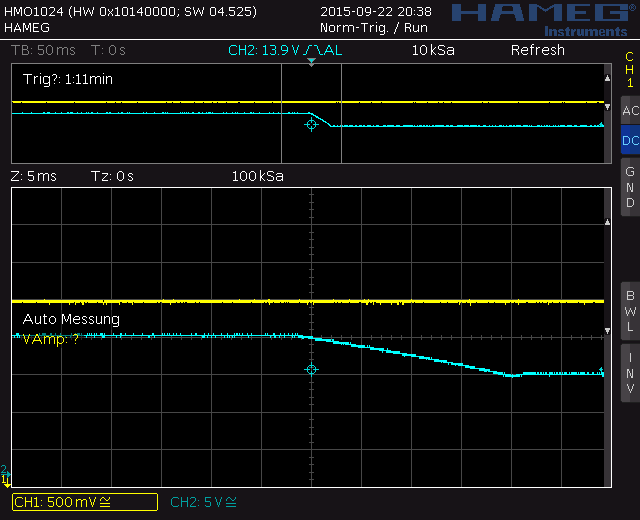
CH1: 3V3
CH2: Spannungswechsel 14V=>18V
Effizienz:
ohne LAN - 3,3V | 155mA:
18,8V | 35,8mA => 75,9%
14,2V | 46,2mA => 77,9%
mit LAN - 3,3V | 242mA:
18,7V | 48,8mA => 87,5%
14,1V | 63,1mA => 89,8 %
mehr Last folgt
Rippel (AC) RMS ~ 7mV
Testtuner: USB TBS5922
Geschrieben von digisat am 23.09.2015 um 20:02:
Bestromung
Hallo Liddll,
als Opfer setzten wir den Egis ein.
Der hat 2 Gleichstrommotore inne.
Die laufen mit 24 Volt und zwischen 1,5 bis 3,7 Ampere als Anfahrspitze unter Last selbst gemessen.
Daher arbeiten wir mit 2 Externen Netzteilen. Die sind bis 24V regelbar und haben 5A
Geschrieben von Liddll am 27.09.2015 um 13:25:
da sollte sich eigentlich der Schrittmotor Treiber dafür "missbrauchen" lassen, hat ja 2 Phasen - die Encoder müssten nur anders eingelesen werden
Versorgungseingang für die Motoren ist allerdings nur einmal pro Treiber über die Busplatine vorgesehen.
Fürs Testsystem mit vorerst 2x Nema 23 (
AS5918L4204-E ) hab ich als Netzteil ein
Mean Well NDR-240-24 eingeplant.
Forensoftware: Burning Board 2.3.6, entwickelt von WoltLab GmbH

